| МђНщ
ЁЁЁЁIEEE 1588БъзМЕЎЩњгк2002ФъЃЌжївЊЖЈвхЭјТчЗжВМЪНЪБжгЕФЭЌВНавщЁЃВтЪдгыВтСПЁЂЕчаХКЭЖрУНЬхСїДІРэЕШаэЖрВЛЭЌгІгУЃЌЖМПЊЪМЪзбЁетжжЪБжгЭЌВНЗНЗЈЁЃетжжБъзМЛЏЪБжгЭЌВНЗЈГЩБОаЇвцИпЃЌжЇГжвьЙЙЯЕЭГЃЌВЂПЩЬсЙЉФЩУыМЖЭЌВНОЋЖШЁЃ
ЁЁЁЁБОЮФНщЩмдАцIEEE 1588-2002БъзМвдМАИќаТАцБОIEEE 1588-2008жаЕФИФНјФкШнЁЃгЩгкIEEE 1588дквЛаЉФПБъгІгУжадНРДдНживЊЃЌвђДЫADSP-BF5181Blackfin®ЧЖШыЪНДІРэЦїжавВМЏГЩзЈгУгВМўРДжЇГжIEEE 1588ЁЃБОЮФНЋИХвЊНщЩмЦфЙІФмЃЌВЂЭЈЙ§вЛИіЪОР§РДеЙЪОРћгУADSP-BF518ДІРэЦїНтОіЗНАИЛёЕУЕФЪБжгЭЌВНадФмНсЙћЁЃ
ЁЁЁЁЯждкМИЕуСЫЃП
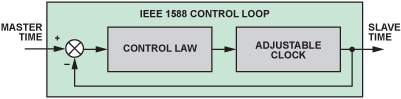
ЁЁЁЁДѓЖрЪ§ЯЕЭГЖМашвЊРћгУБОеёРДЮЌЛЄздМКЕФЪБМфИХФюЁЃЭМ1ЯдЪОгВМўКЭШэМўШчКЮзщКЯЃЌдкЯЕЭГФкВњЩњЪБМфаХЯЂЁЃ
ЁЁЁЁ
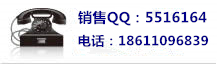
ЁЁЁЁЭМ1. БОЕиМЦЪБ
ЁЁЁЁЯЕЭГФкЕФгВМўКЭШэМўзЪдДОљПЩЪЙгУДЫЪБМфаХЯЂЁЃЖдгкгВМўЃЌеёЕДЦїЪБжгЛсВњЩњвЛИіЛђЖрИіЮяРэЪБжгаХКХЃЈЪБжгЪфГіЃЉЃЌВЂПЩРћгУетаЉЪБжгаХКХЧ§ЖЏЛђДЅЗЂЯЕЭГЕФЦфЫќВПЗжЁЃШэМўжаЮЌЛЄЕФЪБМфЭЈГЃГЦЮЊЁАЯЕЭГЪБМфЁБЁЃЯЕЭГЪБМфПЩвдгУЪБжгТіГхЪ§ЛђУы/ФЩУыЕФаЮЪНБэЪОЁЃЯЕЭГШэМўРћгУеёЕДЦїЪБжгТіГхЪ§МАЦфЦЕТЪаХЯЂЕУГіЪБМфЃЌВЂЬсЙЉЁАгІгУГЬађБрГЬНгПкЁБ(API)КЏЪ§ЃЌШэМўЕФЦфЫќВПЗжПЩвдЪЙгУетаЉКЏЪ§МьЫїВЂЩшжУЪБМфЁЃШчЙћашвЊОјЖдЪБМфЃЌдђЫљЬсЙЉЕФЪБМфНЋгыдЄЖЈвхЪБМфЕуЃЌМДЛљзМЪБМфЕуЯрЙиСЊЁЃ
ЁЁЁЁЪБжгЭЌВН
ЁЁЁЁаэЖргІгУвЊЧѓСНЬЈЖРСЂЕФЩшБИвдЭЌВНЗНЪНЙЄзїЁЃШчЙћУПЬЈЩшБИНівРППздМКЕФеёЕДЦїЃЌдђИїеёЕДЦїЕФЬиадгыЙЄзїЬѕМўВювьНЋЛсЯожЦЪБжгЭЌВНЙЄзїЕФФмСІЁЃвЛаЉМђЕЅПЩааЕФНтОіЗНАИПЩвдПЫЗўетаЉЯожЦЃЌАќРЈЃК
ЁЁЁЁЫљгаЩшБИЙВгУвЛИіЮяРэеёЕДЦїЁЃетжжЗНЗЈНіЖдОрРыКмНќЕФЗжВМЪНЯЕЭГПЩааЃЛИпЦЕЪБжгаХКХЮоЗЈЪЕЯжГЄОрРыПЩППДЋЪфЁЃ
ЫљгаЩшБИОљЪЙгУЬиадМИКѕЭъШЋЯрЭЌЕФеёЕДЦїЁЃгЩгкКмФбЛёЕУМИКѕЭъШЋвЛбљЕФеёЕДЦїЃЌВЂШЗБЃадФмВЛЫцЪБМфЦЎвЦЃЌвђДЫетжжЗНЗЈВЛПЩааЁЃИќживЊЕФЪЧЃЌИїеёЕДЦїЕФЙЄзїЬѕМўВЂВЛЯрЭЌЁЃ
ШчЙћЫљгаЩшБИОљЭЈЙ§вЛИіЭЈаХЭјТчЃЈР§ШчвдЬЋЭјЃЉЛЅСЌЃЌдђетаЉЩшБИПЩвдЭЈЙ§ЭјТчНЛЛЛЪБМфЯћЯЂЃЌИљОнЕЅИіЁАжїЁБЪБжгЖЏЬЌЕїећИїздЕФЪБжгЁЃРћгУДЋЭГЕФЪБМфЭЌВНавщЁЊЁЊЁАЭјТчЪБМфавщЁБ(NTP)ЃЌЯЕЭГжаЕФУПЬЈЩшБИИљОнЫќДгNTPЪБМфЗўЮёЦїЛёШЁЕФЪБМфаХЯЂЕїећЦфЪБжгЁЃШЛЖјЃЌИУавщжЛФмЪЕЯжКСУыМЖЭЌВНОЋЖШЁЃ
IEEE 1588ЖЈвхСЫвЛИіаТавщЃЌФмЙЛЪЕЯжФЩУыМЖЭЌВНОЋЖШЁЃЯТУцЬжТлИУБъзМШчКЮЪЕЯжетжжЫЎЦНЕФЪБжгЭЌВНЁЃ
ЁЁЁЁIEEE 1588гаКЮзїгУ
ЁЁЁЁIEEE 1588БъзМЖЈвхСЫвЛжжЪБМфЭЌВНавщЃЌЪЪгУгкЕиРэЮЛжУЗжЩЂЕЋЭЈЙ§ФГжжЭЈаХММЪѕЃЈР§ШчвдЬЋЭјЃЉЛЅСЌЕФЩшБИЁЃЩшБИжЎМфЭЈЙ§НЛЛЛЪБађЯћЯЂЃЌДгЖјБЃГжЯрЭЌЕФОјЖдЯЕЭГЪБМфЃЈгУУыКЭФЩУыБэЪОЃЉЁЃ
ЁЁЁЁвЊЪЕЯжДЫФПБъЃЌвЛИіжБЙлЕФЗНЗЈЪЧНЋвЛЬЈОпгаЁАзюМбЁБЃЈзюОЋШЗЃЉЪБжгЕФЩшБИжИЖЈЮЊЁАжїЪБжгЁБЩшБИЃЌШУЫќЯђЦфЫќЩшБИЙуВЅЦфЪБМфЁЃЦфЫќЩшБИНЋЛсЕїећИїздЕФЪБМфЃЌгыжїЪБжгЫљЗЂЫЭЕФЪБМфБЃГжвЛжТЁЃВЛЙ§ЃЌетжжНтОіЗНАИвВгаМИЕуВЛзуЃК
ЁЁЁЁжїЪБжгЩшБИЮоЗЈвдМЋЖЬЕФМфИєЙуВЅЪБМфЃЌвђДЫЁАДгЁБЪБжгЩшБИБиаыЪЙгУздМКЖРСЂЕФЁАЕЭСгЁБеёЕДЦїЃЌдкжїЪБжгЩшБИЕФСНДЮЙуВЅжЎМфВхШыЪБМфЕуЁЃетНЋЕМжТжїЪБжгИќаТжмЦкжЎМфЕФЭЌВНОЋЖШЯТНЕЁЃ
ЙуВЅТЗОЖФбУтДцдкбгГйЃЌбгГйЗљЖШШЁОігкЭЈаХММЪѕЃЌР§ШчЮяРэаХКХбиЕМЯпДгвЛЬЈЩшБИДЋЪфжССэвЛЬЈЩшБИЫљашЕФЪБМфЁЃетжжбгГйЛсНјвЛВНРЉДѓжїЪБжггыИїДгЪБжгжЎМфЕФЪЇЕїЁЃ
жїЪБжгЩшБИгыИїДгЪБжгЩшБИжЎМфЕФЙуВЅТЗОЖДцдкВювьЃЌетЛсНјвЛВННЕЕЭИїДгЪБжгЩшБИжЎМфЕФЭЌВНОЋЖШЁЃ
IEEE 1588вЊЧѓЭЈЙ§ВтСПТЗОЖбгГйЃЌНтОіЕкЖўИіКЭЕкШ§ИіЮЪЬтЁЃЫќЛЙвЊЧѓД§ЕїећЕФДгЪБжггыжїЪБжгБЃГжВНЕївЛжТЃЌДгЖјМѕЧсЕквЛИіЮЪЬтЁЃШчЙћПЩФмЃЌЪЙгУИќаЁЕФЙуВЅМфИєКЭИќИпжЪСПЕФеёЕДЦїЃЌПЩвдНјвЛВНМѕЧсЕквЛИіЮЪЬтЁЃ
ЁЁЁЁIEEE 1588ШчКЮВтСПЭЈаХбгГй
ЁЁЁЁIEEE 1588-20022 ЖЈвхСЫЫФжжЯћЯЂSyncЁЂFollowupЁЂDelayReqКЭDelayRespЃЌгУРДВтСПЧАЯђЃЈжїЪБжгжСДгЪБжгЃЉКЭКѓЯђЃЈДгЪБжгжСжїЪБжгЃЉТЗОЖЕФЭЈаХбгГйЁЃИќаТАцБОIEEE 1588-2008,3ЛЙЬсЙЉЦфЫќЛњжЦЃЌаТдіШ§жжЯћЯЂЃКPdelayReqЁЂPdelayRespКЭ PdelayRespFollowupРДВтСПЁАЕуЖдЕубгГйЁБЁЃ
ЁЁЁЁетаЉЯћЯЂжаЃЌSyncЁЂDelayReqЁЂPdelayReqКЭPdelayRespЪЧЫљЮНЁАЪТМўЁБЯћЯЂЃЌдкРыПЊКЭЕНДявЛЬЈЩшБИЪББиаыМгЩЯЁАЪБМфДСЁБЃЈМЧТМБОЕиЪБМфЃЉЁЃИјЗжзщМгЩЯЪБМфДСЕФЗНЗЈгаСНжжЃК
ЁЁЁЁ1.ЁЁЯћЯЂгЩШэМўДІРэЪБГіЯжШэМўЪБМфДСЁЃЭЈГЃГіЯждкЯћЯЂЕФНгЪе/ЗЂЫЭЁАжаЖЯЗўЮёГЬађЁБ(ISR)жаЃЌИУЪБМфДСЮЊЯЕЭГЪБМфЕФЕБЧАжЕЁЃ
ЁЁЁЁ2.ЁЁЯћЯЂЪЕМЪЕНДяЛђРыПЊЩшБИЪБГіЯжгВМўЪБМфДСЁЃИУЪБМфДСВйзїгЩгВМўжДааЃЌгВМўЛсЮЌЛЄздМКЕФСЌајЪБМфаХЯЂЁЃ
ЁЁЁЁСНжжЪБМфДСЗНЗЈОљЮЊIEEE 1588ЫљНгЪмЃЌЕЋгВМўЪБМфДСЕФОЋЖШУїЯдИќИпЃЌШчЯТЮФЫљЪіЁЃ
ЁЁЁЁжїЪБжгЩшБИЕНДгЪБжгЩшБИЕФбгГй
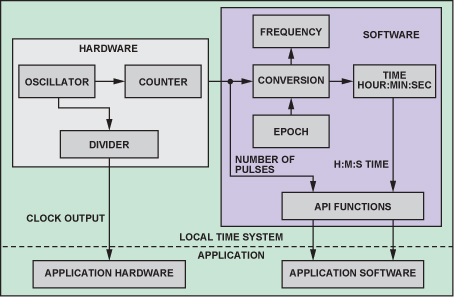
ЁЁЁЁЯћЯЂSyncКЭFollowupгЩжїЪБжгЩшБИЗЂЫЭЃЌДгЪБжгЩшБИИКд№НгЪеетаЉЯћЯЂЃЌВЂМЦЫужїЪБжгЩшБИЕНДгЪБжгЩшБИЕФЭЈаХТЗОЖбгГйЁЃ
ЁЁЁЁЭМ2жаЃЌдкЪБМфЕуTm1ЃЌжїЪБжгЩшБИШэМўЖСШЁЕБЧАБОЕиЯЕЭГЪБМфЃЈTm1ЃЌШэМўЪБМфДСЃЉЃЌНЋЦфВхШыSyncЯћЯЂжаЃЌВЂЫЭГіИУЯћЯЂЁЃИУЯћЯЂдкЩдКѓЕФЪБМфЕуTm1'РыПЊжїЪБжгЩшБИЃЌИУЪБМфЕуЮЊгВМўЪБМфДСЁЃИУЯћЯЂдкЪБМфЕуTs1'ЃЈДгЪБжгЩшБИБОЕиЪБМфЃЉЕНДяДгЪБжггВМўЃЌДгЪБжгЩшБИШэМўдкЩдКѓЕФЪБМфЕуTs1ЪеЕНИУЯћЯЂЁЃИУШэМўНЋЖСШЁгВМўЪБМфДСвдЛёЕУTs1'ЁЃШчЙћУЛгаЭЈаХбгГйЃЌTs1'гІЕШгк(Tm1' + Tms)ЃЌЦфжаTmsЮЊжїЪБжггыДгЪБжгжЎМфЕФЪБМфВюЁЃИУавщЕФзюжеФПБъЪЧВЙГЅДЫЪБМфВюЁЃ
ЁЁЁЁ
ЁЁЁЁЭМ2. ВтСПжїЪБжгЩшБИгыДгЪБжгЩшБИжЎМфЕФЭЈаХбгГй
ЁЁЁЁЗЂЫЭSyncЯћЯЂжЎКѓЃЌжїЪБжгЩшБИШэМўЭЈЙ§ЪБМфДСЕЅдЊЖСШЁSyncЯћЯЂЕФРыПЊЪБМфTm1'ЃЌНЋЦфВхШыFollowupЯћЯЂжаЃЌШЛКѓдкЪБМфЕуTm2ЗЂЫЭИУЯћЯЂЁЃДгЪБжгЩшБИШэМўдкЪБМфЕуTs2ЪеЕНДЫЯћЯЂЁЃДЫЪБЃЌДгЪБжгЩшБИШэМўгаСНИіЪБМфЃКTs1'ЃЈSyncЕНДяЪБМфЃЉКЭTm1'ЃЈSyncРыПЊЪБМфЃЉЁЃжїДгТЗОЖбгГйTmsdгЩЙЋЪН1ШЗЖЈЁЃ
ЁЁЁЁ (1) (1)
ЁЁЁЁДгЪБжгЩшБИЕНжїЪБжгЩшБИЕФбгГй
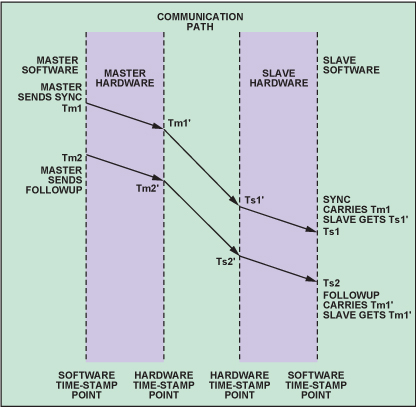
ЁЁЁЁДгЪБжгЩшБИЗЂЫЭDelayReqЯћЯЂЃЌжїЪБжгЩшБИгшвдЯьгІЗЂЫЭDelayRespЯћЯЂЁЃРћгУетаЉЯћЯЂЃЌДгЪБжгЩшБИПЩвдМЦЫуДгЪБжгЩшБИЕНжїЪБжгЩшБИЕФЭЈаХТЗОЖбгГйЁЃ
ЁЁЁЁдкЪБМфЕуTs3ЃЈЭМ3ЃЉЃЌДгЪБжгЩшБИШэМўЖСШЁЕБЧАБОЕиЯЕЭГЪБМфЃЈTs3ЃЉЃЌНЋЦфВхШыDelayReqЯћЯЂжаЃЌВЂЫЭГіИУЯћЯЂЁЃ
ЁЁЁЁ
ЁЁЁЁЭМ3. ВтСПДгжїЭЈаХбгГй
DelayReqЯћЯЂдкЩдКѓЕФЪБМфЕуTm3'ЕНДяжїЪБжгЩшБИЃЌгЩжїЪБжгЩшБИШэМўдкЪБМфЕуTm3ДІРэЁЃШЛКѓЃЌИУШэМўЖСШЁЪБМфДСвдЛёШЁЕНДяЪБМфTm3'ЃЌНЋЦфВхШыDelayRespЯћЯЂжаЃЌВЂдкЪБМфЕуTm4ЗЂЫЭжСДгЪБжгЩшБИЁЃЕБДгЪБжгЩшБИШэМўдкЪБМфЕуTs4ЪеЕНDelayRespЯћЯЂЪБЃЌЫќПЩвдЬсШЁЪБМфTm3'ЃЌВЂЭЈЙ§ЙЋЪН2МЦЫуДгжїЭЈаХбгГйTsmdЁЃ
ЁЁЁЁ  ; (2) ; (2)
ЁЁЁЁЙЋЪН1КЭЙЋЪН2жаОљгавЛИіЮДжЊБфСПЃЌМДжїДгЪБМфВюTmsЃЌвђДЫЮоЗЈЕЅЖРЧѓЕУTmsdЛђTsmdЁЃЕЋЪЧЃЌШчЙћЮвУЧКЯРэЕиМйЩшЭЈаХТЗОЖЪЧЖдГЦЕФЃЌМД
ЁЁЁЁ  (3) (3)
ЁЁЁЁЁЊЁЊетЪЧIEEE 1588ГЩСЂЕФЙиМќМйЩшЁЊЁЊФЧУДЃЌНЋЙЋЪН1гыЙЋЪН2ЯрМгПЩвдЕУГіЃК
ЁЁЁЁ  (4) (4)
ЁЁЁЁгЩгкДгЪБжгЩшБИбАЧѓгыжїЪБжгЩшБИЭЌВНЃЌвђДЫЫљгаетаЉМЦЫуОљгЩетаЉЩшБИжДааЁЃДгЪБжгЩшБИДгжїЪБжгЩшБИЕФFollowupЯћЯЂЛёЕУTm1'ЃЌДгЦфRxЃЈНгЪеЃЉЪБМфДСЛёЕУTs1'ЃЌДгЦфTxЃЈЗЂЫЭЃЉЪБМфДСЛёЕУTs3'ЃЌВЂЭЈЙ§жїЪБжгЩшБИЕФDelayRespЯћЯЂЛёЕУTm3'ЁЃ
ЁЁШчКЮМЦЫуДгЪБжггыжїЪБжгЕФЪБМфВю
ЁЁЁЁвЛЕЉЛёЕУЭЈаХТЗОЖбгГйTdЃЌБуПЩРћгУЙЋЪН1ЛђЙЋЪН2ЧсЫЩМЦЫуДгЪБжггыжїЪБжгЕФЪБМфВюЃЌШчЙЋЪН5КЭЙЋЪН6ЫљЪОЁЃ
ЁЁЁЁ (5) (5)
 (6) (6)
ЁЁЁЁШчКЮЕїећДгЪБжгЩшБИЕФЪБМф
ЁЁЁЁжЊЕРгыжїЪБжгЕФЪБМфВюжЎКѓЃЌИїДгЪБжгашвЊЕїећздМКЕФБОЕиЪБМфЃЌгыжїЪБжгБЃГжвЛжТЁЃИУШЮЮёАќРЈСНЗНУцЁЃЕквЛЃЌДгЪБжгЩшБИашвЊМгЩЯЪБМфВювдЕїећОјЖдЪБМфЃЌЪЙЦфЪБМфдкДЫПЬгыжїЪБжгЪБМфЭъШЋвЛжТЁЃЕкЖўЃЌДгЪБжгЩшБИашвЊЕїећИїздЕФЪБжгЦЕТЪЃЌгыжїЪБжгЕФЦЕТЪБЃГжвЛжТЁЃЮвУЧВЛФмЕЅППОјЖдЪБМфЃЌвђЮЊЪБМфВюНідквЛЖЈЦкМфФкгІгУЃЌПЩФмЪЧе§жЕЃЌвВПЩФмЪЧИКжЕЃЛЕїећЕФНсЙћЪЧДгЪБжгЪБМфЯђЧАЬјдОЛђЯђКѓЕЙЭЫЁЃвђДЫЃЌдкЪЕМЪВйзїжаЃЌЕїећЗжСНВНжДааЃК
ЁЁЁЁ1. ШчЙћЪБМфВюЙ§ДѓЃЌР§Шч1УывдЩЯЃЌдђгІгУОјЖдЪБМфЕїећЁЃ
ЁЁЁЁ2. ШчЙћЪБМфВюНЯаЁЃЌдђЪЙДгЪБжгЕФЦЕТЪИФБфФГвЛАйЗжБШЁЃ
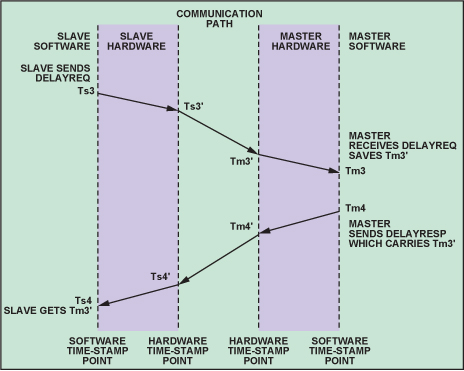
ЁЁЁЁвЛАуЖјбдЃЌИУЯЕЭГЛсБфГЩвЛИіПижЦЛЗТЗЃЌЦфжажїЪБжгЪБМфЪЧВЮПМУќСюЃЌЖјДгЪБжгЪБМфЪЧИњзйжїЪБжгЪБМфЕФЪфГіЃЌЖўепжЎВюЧ§ЖЏПЩЕїећЪБжгЁЃПЩвдЪЙгУPIDПижЦРДЪЕЯжЬиЖЈИњзйадФмЃЌетЪЧаэЖрIEEE 1588ЪЕЪЉЗНАИГЃгУЕФЗНЗЈЁЃЭМ4ЯдЪОСЫетжжПижЦЛЗТЗЁЃ
ЁЁЁЁ
ЁЁЁЁЭМ4. IEEE 1588ПижЦЛЗТЗ
ЁЁЕуЖдЕубгГй
ЁЁЁЁаоЖЉАцIEEE 1588-2008в§ШыСЫаТЕФЛњжЦРДВтСПТЗОЖбгГйЃЌГЦЮЊЁАЕуЖдЕуЁБ(P2P)бгГйЁЃгыжЎЯрБШЃЌЩЯЮФЬжТлЕФжїДгЛњжЦдђЪЧЁАЖЫЖдЖЫЁБ(E2E)бгГйЁЃдкжЇГжIEEE 1588-2008ЕФЭјТчжаЃЌжїЪБжгЩшБИПЩвдгыДгЪБжгЩшБИжБНгЯрСЌЃЌЛђепИєМИИіжаМЬеОЃЈМЖЃЉЯрСЌЁЃE2EбгГйЪЕМЪЩЯЪЧжїЪБжгЩшБИЕНДгЪБжгЩшБИЕФЁАзмЁБбгГйЃЌАќРЈЦфМфЕФЫљгажаМЬеОдкФкЁЃЕЋЪЧЃЌP2PбгГйдђНіЯогкСНИіжБНгЯрСЌЕФЩшБИЁЃЭЈаХТЗОЖЕФзмбгГйЕШгкЫљгажаМЬеОЕФP2PбгГйжЎКЭЁЃДгШЗБЃТЗОЖЖдГЦадЕФНЧЖШПДЃЌP2PЛњжЦПЩЬсЙЉИќИпЕФОЋЖШЁЃ
ЁЁЁЁШчЩЯЮФЫљЪіЃЌIEEE 1588-2008аТдіСЫPdelayReqЁЂPdelayRespКЭPdelayRespFollowupШ§жжЯћЯЂРДВтСПP2PбгГйЁЃетаЉЯћЯЂЕФЙЄзїЗНЪНгыЩЯЮФЫљЪіЗНЪНЯрЫЦЃЌЯъЧщЧыПДВЮПМЮФЯз3ЁЃ
ЁЁЁЁгАЯьЭЌВНадФмЕФвђЫи
ЁЁЁЁОЋаФЩшМЦЕФIEEE 1588ЩшБИФмЙЛЪЕЯжИпЖШОЋШЗЕФЪБжгЭЌВНЃЌЕЋвВБиаыСЫНтжБНггАЯьЭЌВНадФмЕФжївЊвђЫиЃЌЦфжаАќРЈЃК
ЁЁЁЁ1. ТЗОЖбгГйЃКШчЩЯЮФЫљЪіЃЌIEEE 1588ЕФТЗОЖбгГйВтСПМйЩшЭЈаХТЗОЖбгГйЪЧЖдГЦЕФЃЌМДЧАЯђТЗОЖЕФДЋЪфбгГйгыКѓЯђДЋЪфбгГйЯрЭЌЁЃДЫЭтЃЌдкбгГйВтСПЦкМфЃЌбгГйВЛгІБфЛЏЁЃВтСПЦкМфбгГйБфЛЏЛсЕМжТВЛЖдГЦКЭбгГйЖЖЖЏЃЌетНЋжБНггАЯьЭЌВНОЋЖШЁЃЫфШЛЮоЗЈдкIEEE 1588ЩшБИЕФБпНчжЎЭтПижЦбгГйЖдГЦадКЭЖЖЖЏЃЌЕЋШчЙћВтСПЛљгкгВМўЪБМфДСЃЌдђПЩдкЩшБИФкИФЩЦТЗОЖЖдГЦадКЭЖЖЖЏЁЃгЩгкжаЖЯбгЪБЁЂЛЗОГЧаЛЛКЭЯпГЬЕїЖШЃЌШэМўЪБМфДСЛсЕМжТУїЯдЕФЖЖЖЏЃЌЖјгВМўЪБМфДСдђВЛДцдкетвЛЮЪЬтЁЃ
ЁЁЁЁ2. ЪБжгЕФЦЏвЦКЭЖЖЖЏЬиадЃКжїЪБжгЕФЦЕТЪКЭЯрЮЛДњБэИњзйПижЦЯЕЭГЕФЪфШыЃЌДгЪБжгдђЪЧПижЦЖдЯѓЁЃжїЪБжгЕФШЮКЮЪББфааЮЊЖМЛсШХЖЏИУПижЦЯЕЭГЃЌЕМжТЮШЬЌКЭЫВЬЌСНжжЮѓВюЁЃвђДЫЃЌЪБжгЕФЦЏвЦКЭЖЖЖЏдНЕЭЃЌдђЭЌВНОЋЖШдНИпЁЃ
ЁЁЁЁ3. ПижЦЗЈдђЃКДгЪБжгЕїећШчКЮаЃе§ДгЪБжгЩшБИЕФЪБМфЮѓВюШЁОігкПижЦЗНЗЈЁЃПижЦЗЈдђВЮЪ§АќРЈНЈСЂЪБМфЁЂЙ§ГхКЭЮШЬЌЮѓВюЃЌЖМНЋжБНггАЯьЪБжгЭЌВНадФмЁЃ
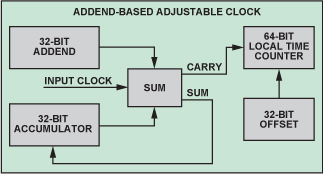
ЁЁЁЁ4. ЪБжгЗжБцТЪЃКШчЭМ1ЫљЪОЃЌБОЕиЪБМфЕФЗжБцТЪгЩЪБжгЦЕТЪОіЖЈЃЛзюаЁЪБМфдіСПЮЊЪБжгаХКХЕФвЛИіжмЦкЁЃIEEE 1588-2002жЇГж1 nsЕФЪБМфЗжБцТЪЃЌIEEE 1588-2008дђжЇГж2ЈC16 nsЕФЪБМфЗжБцТЪЁЃ216 (!) GHzЃЈЩѕжС1 GHzЃЉЕФЪБжгЪЧВЛЯжЪЕЕФЁЃБОЕиЪБжгЕФСПЛЏЛсгАЯьБОЕиЪБМфВтСПКЭПижЦЕФОЋЖШЁЃ
ЁЁЁЁ5. SyncЯћЯЂЕФЗЂЫЭжмЦкЃКДгЪБжгЕФИќаТЦЕТЪзюжеЛсгАЯьЭЌВНОЋЖШЁЃвђЮЊЪБМфЮѓВюЪЧДгЪБжгЦЕТЪЮѓВюЕФећЬхРлЛ§жЕЃЌЫљвдЗЂЫЭжмЦкдНГЄЃЌЯТвЛИіSyncЫљЙлВьЕНЕФЪБМфЮѓВювЛАуЛсдНДѓЁЃ
ЁЁЁЁ6. бгГйВтСПЕФЦЕТЪЃКвддЄЦкЯрСкВЩбљЕужЎМфбгГйУЛгаУїЯдБфЛЏЕФМфИєЪБМфЃЌЖЈЦкжДаабгГйВтСПЁЃШчЙћIEEE 1588ЭјТчЕФбгГйБфЛЏНЯДѓЃЌдђдіМгбгГйВтСПЦЕТЪПЩвдИФЩЦЪБжгЭЌВНадФмЁЃ
ЁЁЁЁФФИіЪЧжїЪБжгЃП
ЁЁЁЁдкПМТЧШчКЮОЋШЗШЗЖЈжїЪБжгЩшБИгыДгЪБжгЩшБИжЎМфЕФЪБМфВюжЎКѓЃЌЯТвЛИіЯрЙиЮЪЬтЪЧЃКдкГЩАйЩЯЧЇЬЈЛЅСЌЩшБИжаЃЌШчКЮШЗЖЈФФвЛЬЈЩшБИГфЕБжїЪБжгЁЃ
ЁЁЁЁEEE 1588ЖЈвхСЫвЛжжГЦЮЊЁАзюМбжїЪБжгЁБ(BMC)ЫуЗЈЕФЗНЗЈЃЌгУгкбЁдёжїЪБжгЩшБИЁЃетжжЗНЗЈвЊЧѓIEEE 1588ЭјТчЕФУПЬЈЩшБИОљЬсЙЉвЛИіЪ§ОнМЏЃЌУшЪіЦфБОЕиЪБжгЕФаджЪЁЂжЪСПЁЂЮШЖЈадЁЂЮЈвЛЪЖБ№ЗћКЭЪзбЁЩшжУЁЃЕБвЛЬЈЩшБИМгШыIEEE 1588ЭјТчЪБЃЌЫќЛсЙуВЅЦфЪБжгЕФЪ§ОнМЏЃЌВЂНгЪеЫљгаЦфЫќЩшБИЕФЪ§ОнМЏЁЃРћгУЫљгаВЮгыЩшБИЕФЪ§ОнМЏЃЌУПЬЈЩшБИОљдЫааЭЌвЛBMCЫуЗЈЃЌвдШЗЖЈжїЪБжгМАЦфздМКЕФЮДРДзДЬЌЃЈжїЪБжгЛђДгЪБжгЃЉЁЃгЩгкЫљгаЩшБИОљВЩгУЭЌбљЕФЪ§ОнЖРСЂжДааЭЌвЛЫуЗЈЃЌвђДЫНсТлНЋЛсЯрЭЌЃЌЩшБИжЎМфВЛашвЊНјааШЮКЮаЩЬЁЃгаЙиBMCЫуЗЈЕФИќЖрЯъЯИаХЯЂЃЌЧыПДВЮПМЮФЯз2КЭ3ЁЃ
ЁЁЁЁADSP-BF518ДІРэЦїжЇГжIEEE 1588
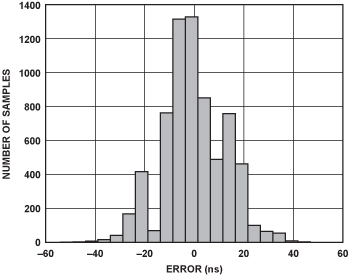
ЁЁЁЁADIЙЋЫОBlackfin DSPЯЕСазюНќаТдівЛПюВњЦЗЃКADSP-BF518ДІРэЦїЁЃЯёЧАПюВњЦЗADSP-BF537,4вЛбљЃЌИУДІРэЦїФкжУЁАвдЬЋЭјУНЬхЗУЮЪПижЦЦїЁБ(EMAC)ФЃПщЁЃЫќЛЙОпгаTSYNCФЃПщЃЌНјвЛВНРЉеЙСЫжЇГжIEEE 1588БъзМEMACЙІФмЕФФмСІЃЛЛЙЬсЙЉЦфЫќЖюЭтЬиадЃЌПЩжЇГжвдЬЋЭјЕФИїжжIEEE 1588гІгУЁЃЭМ5ЯдЪОСЫTSYNCФЃПщЕФПђЭМЁЃ ADSP-BF51x BlackfinДІРэЦїгВМўВЮПМЬсЙЉСЫИќЖраХЯЂЁЃ5
ЁЁЁЁ
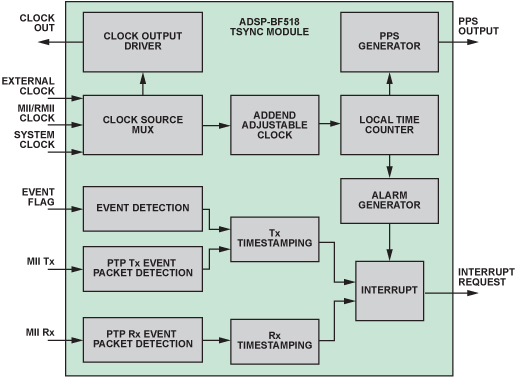
ЁЁЁЁЭМ5. ADSP-BF518ДІРэЦїTSYNCФЃПщЕФПђЭМ
ЁЁ ЗжзщМьВт
ЁЁЁЁADSP-BF518ДІРэЦїПЩвдМьВтIEEE 1588ЕФЫљгаЪТМўЯћЯЂЃЌАќРЈЫЭШыКЭЫЭГіЕФЗжзщЃЌВЂЮЊЦфЬсЙЉгВМўЪБМфДСЁЃвђЮЊЪТМўЯћЯЂЪБМфДСЕФОЋЖШМАЦфЬсШЁЮЛжУЛсгАЯьТЗОЖбгГйЕФЖдГЦадКЭЮШЖЈадвЊЧѓЃЌЫљвдIEEE 1588ЯЕЭГЕФОЋЖШдкКмДѓГЬЖШЩЯШЁОігкетЖўепЁЃADSP-BF518ЕФTSYNCФЃПщГжајМрПиMACПижЦЦїгывдЬЋЭјЁАЮяРэНгПкЪеЗЂЦїЁБ(PHY)жЎМфЕФгВМўНгПкЃЌМДЁАУНЬхЖРСЂНгПкЁБ(MII)ЃЌВЂЧвжЛвЊМьВтЕНЪТМўЯћЯЂЃЌОЭЛсВњЩњгВМўЪБМфДСЃЌетвЛЙІФмПЩЬсИпADSP-BF518ЕФЭЌВНОЋЖШЁЃ
ЁЁЁЁЪТМўЯћЯЂМьВтЙІФмЪЧПЩБрГЬЕФЃЌЛљБОХфжУгаСНжжЃКжЇГжIEEE 1588-2002ЃЈФЌШЯзДЬЌЃЉЛђжЇГжIEEE 1588-2008ЁЃДЫЭтЃЌетжжПЩБрГЬФмСІЛЙжЇГжНЋРДАцБОЕФIEEE 1588ЃЌвдМАЦфЫќвЊЧѓЪБМфДСЕФвЛАуавщЃЌАќРЈХфжУЮЊИјНјГіДІРэЦїЕФУПИівдЬЋЭјЗжзщМгЩЯЪБМфДСЁЃ
ЁЁЁЁСщЛюЕФЪБжгдД
ЁЁЁЁБОЕиЪБжгЕФЪєадЖдгкIEEE 1588ЯЕЭГЕФадФмКмживЊЁЃЮЊСЫТњзуИїжжВЛЭЌгІгУЕФвЊЧѓЃЌADSP-BF518ДІРэЦїПЩЬсЙЉШ§жжБОЕиЪБжгдДбЁЯюЃКЯЕЭГЪБжгЁЂЭтВПЪБжгЛђвдЬЋЭјЪБжгЁЃШчЙћгІгУОпгаЬиЖЈЪБжгвЊЧѓЃЌдђПЩвдбЁдёЁАЭтВПЪБжгЁБЃЌВЂЬсЙЉЖЈжЦЪБжгдДЁЃШчЙћжїЪБжгЩшБИгыДгЪБжгЩшБИЁАБГППБГЁБСЌНгЃЌгЩгкЁАвдЬЋЭјЪБжгЁБРДздвдЬЋЭјЯпТЗЃЌЖјЧвСНЬЈЩшБИВЩгУЭЌвЛЪБжгЙЄзїЃЌвђДЫИУЪБжгбЁЯюПЩвдЬсЙЉСМКУЕФОЋЖШЁЃвЛАугІгУПЩвдбЁдёДІРэЦїЕФЁАЯЕЭГЪБжгЁБзїЮЊЪБжгдДЁЃ
ЁЁЁЁЫљбЁдДЪБжгвВгЩTSYNCФЃПщЧ§ЖЏЃЌЭЈЙ§ЬиЖЈв§НХClockoutзїЮЊДІРэЦїЪфГіЃЌЯЕЭГЕФЦфЫќВПЗжПЩРћгУИУЪфГіЬсЙЉБОЕиЪБМфаХЯЂЁЃ
ЁЁЁЁPPSЪфГі
ЁЁЁЁЁАУПУыТіГхЁБ(PPS)аХКХЪЧЪБМфаХЯЂЕФЮяРэБэЪОЁЃЫќУћвхЩЯЪЧвЛИі1-HzаХКХЃЌдкУПИі1УызЊЛЛЪБМфЗЂГівЛИіТіГхЁЃЫќПЩгУРДПижЦБОЕиЩшБИЃЌЛђепдкЗЂЩњЭјТчЙЪеЯЪБЬсЙЉИЈжњЪБМфЭЈЕРЁЃЫќвВПЩвдгУгкВтЪдЁЃСНЬЈЩшБИЕФPPSаХКХжЎМфЕФЯрЮЛВюЪЧЖўепЪБМфЦЋвЦЕФЮяРэСПЖШЁЃ
ЁЁЁЁADSP-BF518ДІРэЦїЬсЙЉСщЛюЕФPPSЪфГіЁЃЫќРћгУПЩБрГЬЁАПЊЪМЪБМфЁБ(PPS_ST)КЭжмЦк(PPS_P)ВњЩњвЛИідкЪБМф(PPS_ST + n ЁС PPS_P)ЗЂГіТіГхЕФаХКХЃЌЦфжаn = 1, 2, 3ЁЁЃЛљБОгУЗЈЪЧНЋPPS_PЩшжУЮЊ1УыЃЌВЂНЋPPS_STЩшжУЮЊгУУыЪ§БэЪОЕФНЋРДШЮвЛЪБПЬЃЌДгЖјВњЩњPPSаХКХЁЃВЮПМЛљБОгУЗЈЃЌПЩвдРћгУетжжPPSЪфГіЙІФмВњЩњОпгаПЩБрГЬЦЕТЪКЭПЊЪМЪБМфЕФжмЦкадаХКХЁЃ
ЁЁЁЁИЈжњПьее
ЁЁЁЁвЛаЉгІгУПЩФмашвЊАДееБъжОаХКХЧаЛЛжИЪОЃЌИјФГвЛЪТМўМгЩЯЪБМфДСЁЃADSP-BF518ЕФTSYNCФЃПщЭЈЙ§ИЈжњЁАПьееЁБЙІФмЃЌЪЙгУвЛИізЈгУв§НХРДНгЪеЭтВПБъжОЃЌвдБуЪЕЯжетжжЧыЧѓЁЃЧаЛЛБъжОНЋДЅЗЂИУФЃПщВЖзНЪБМфДСМФДцЦїжаЕФЕБЧАБОЕиЪБМфЃЌЙЉШэМўЗУЮЪЁЃ
ЁЁЁЁБЈОЏ
ЁЁЁЁШчЙћгІгУашдкЬиЖЈЪБМфжДаавЛЯюШЮЮёЃЌдђПЩвдгУTSYNCФЃПщЕФЁАБЈОЏЁБЙІФмЁЃетЯюЙІФмПЩвдЩшжУБОЕиОјЖдЪБМфЃЌЕНДяИУЪБМфЪБЃЌОЭЛсДЅЗЂДІРэЦїжаЖЯЁЃШЛКѓЃЌШэМўБуПЩРћгУжаЖЯжДааШЮЮёЁЃ
ПЩЕїЪБжг
ЁЁЁЁTSYNCФЃПщЕФПЩЕїЪБжгЪЧвЛжжЁАЛљгкМгЪ§ЁБЕФЪБжгЁЃШчЭМ6ЫљЪОЃЌЫќЛёЕУвЛИіЙЬЖЈЪфШыЪБжгаХКХЃЌВЂЪфГіИУЪфШыЕФЁАЕСШЁТіГхЁБАцБОаХКХЃКЖдгкУПИіЪфШыЪБжгЃЌЁАМгЪ§ЁБЕФжЕдіМгЕНРлМгЦїжаЃЌВЂЧвУПДЮРлМгЦївчГіЪБЃЌНјЮЛЮЛОЭЛсЧ§ЖЏЁАБОЕиЪБМфМЦЪ§ЦїЁБЃЌДгЖјВњЩњвдТіГхМЦЪ§жЕБэЪОЕФБОЕиЪБМфЁЃИќИФМгЪ§ПЩвдЕїећБОЕиЪБжгЕФЦЕТЪЃЌвђЮЊМгЪ§ОіЖЈРлМгЦївчГіЕФЦЕТЪЃЌДгЖјОіЖЈБОЕиЪБМфМЦЪ§ЦїЕндіЕФЦЕТЪЁЃШчЙћЪфШыЪБжгЕФЦЕТЪЮЊFinЃЌЧвМгЪ§ЕФжЕЮЊAЃЌдђБОЕиЪБжгЦЕТЪЮЊЃК
ЁЁЁЁ 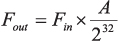 (7) (7)
ЁЁЁЁ
ЁЁЁЁЭМ6. ЛљгкМгЪ§ЕФПЩЕїЪБжг
ЁЁЁЁВЩгУADSP-BF518ДІРэЦїЕФIEEE 1588ЪЕЪЉЗНАИ
ЁЁЁЁADSP-BF518ДІРэЦїЩЯЙЙНЈСЫвЛИіЭъећЕФIEEE 1588-2008МцШнЯЕЭГЃЌШчЭМ7ЫљЪОЁЃ
ЁЁЁЁЭМ7. ВЩгУADSP-BF518ЕФIEEE 1588ЪЕЪЉЗНАИ
ЁЁЁЁДІРэЦїЕФTSYNCФЃПщМьВтЫЭШыКЭЫЭГіЕФIEEE 1588ЯћЯЂЃЌВЂЭЈЙ§гВМўИјЪТМўЯћЯЂМгЩЯЪБМфДСЁЃгЩIXXAT (IXXAT Automation GmbH)ЬсЙЉЕФIEEE 1588авщеЛШэМўПЩЪЕЯжБъзМЫљвЊЧѓЕФЯћЯЂНЛЛЛавщЁЃЫќРћгУTSYNCЧ§ЖЏГЬађЖСШЁЁЂаДШыВЂЕїећTSYNCЪБжгЃЌВЂЪЙгУMACПижЦЦїЧ§ЖЏГЬађдквдЬЋЭјMACВуЃЈПЊЗХЯЕЭГЛЅСЌФЃаЭЕФЕкЖўВуЃЉЗЂЫЭКЭНгЪеЯћЯЂЁЃЫќЛЙПЩЪЕЯжP2PбгГйВтСПЕФПижЦЗЈдђКЭЙ§ТЫЁЃвдЬЋЭјPHYбЁдёОпгаЕЭЖЖЖЏбгГйЬиадЕФNational Semiconductor DP838486 ЁЃЮЊМђУїЦ№МћЃЌTSYNCФЃПщЪБжгдДбЁдёДІРэЦїЕФЯЕЭГЪБжг(80 MHz)ЁЃ
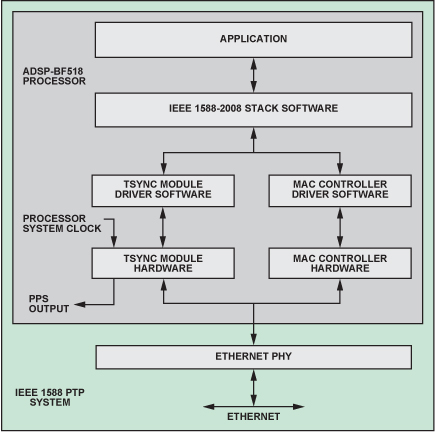
ЁЁЁЁЭМ8. ADSP-BF518ЩЯIEEE 1588ЯЕЭГЕФДгЪБжгЮѓВюжБЗНЭМ
ЁЁЁЁЭМ8ЪЧСНИіЭъШЋЯрЭЌЕФADSP-BF518 IEEE 1588ЯЕЭГжЎМфЕФВтСПЮѓВюжБЗНЭМЃЌгЩДЫПЩПДГіИУЦїМўЕФЪБжгЭЌВНадФмЁЃдкдМ1700УыЕФЪБМфФкЙВНјааСЫ6938ДЮВтСПЁЃзюжеЦНОљЮѓВюЮЊ0.015 nsЃЌБъзМВюЮЊ12.96 nsЁЃИУВтЪдЫљгУЕФSyncЯћЯЂМфИєЮЊ0.25УыЁЃ
ЁЁЁЁНсТл
ЁЁЁЁIEEE 1588БъзМЬсЙЉСЫвЛжжИпОЋЖШЁЂЕЭГЩБОЕФЗжВМЪНЪБжгЭЌВНЗНЗЈЁЃЫфШЛIEEE 1588ВЂЮДУїЮФвЊЧѓгВМўжЇГжЃЌЕЋгВМўИЈжњЯћЯЂМьВтКЭЪБМфДСЖдгкЪЕЯжМЋИпЭЌВНОЋЖШжСЙиживЊЁЃADSP-BF518ЮЊIEEE 1588-2002КЭIEEE 1588-2008ЬсЙЉгВМўжЇГжЃЌАќРЈИїжжгІгУЕФжЇГжЙІФмЁЃРћгУADSP-BF518ДІРэЦїКЭIXXAT IEEE 1588-2008авщШэМўЪЕЪЉIEEE 1588ММЪѕЃЌвбжЄУїПЩвдЪЕЯжИпОЋЖШЪБжгЭЌВНЁЃЁЁЁЁ |