| 1. 引 言
SAR(合成孔径雷达)具有全天候、全天时、远距离、高分辨成像等特点,可以大大提高雷达的信息获取能力,特别是信息感知能力。SAR成像可以获取高分辨率的图像,近年来受到了很大重视,在军用和民用方面都得到了广泛的应用和发展。
雷达成像经常用到许多经典的信号处理算法,比如滤波(FIR、IIR)、FFT、IFFT、相关算法等。对于这些算法的实现,高速DSP芯片成了首选实时信号处理器件。近年来,DSP性能不断提升,应用领域不断增强。目前主流DSP制造商所生产的DSP已能满足算法复杂、运算速度高、寻址方式灵活和通信性能强大等需求。高端的DSP生产商主要包括TI、Motorola和ADI。其性能都有各自的优点,其中,ADI的TigerSHARC201的浮点处理能力达到3.6 GFLOP,内核时钟600 MHz,同时兼容定点运算,并且在内部结构上采用双处理器核,支持SIMD处理方式,是雷达信号处理领域理想的处理器。从处理能力上来看,TigerSHARC201不是最强的,但是考虑到运算与I/O平衡的话,ADI的DSP更适合于成像信号处理。其非常宽的总线宽度和高速LINK口使DSP有很高的数据吞吐率,适合于构成大型的并行系统。
2. 实时成像硬件结构
实时成像处理过程可由板载采集控制卡、信号处理卡和显示系统完成,首先板载采集控制卡完成对雷达回波中频信号的模数转换,然后将数据传送给信号处理卡,由信号处理卡完成对回波信号的运算,得出实时的图像。实时图像再通过CPCI总线传给主机,然后显示在主机的显示器上。
实时图像的显示由主机通过CPCI总线将处理的结果读到主机内存,然后显示在主机的显示器上,多个图像连续出现时将可以进行滑动的显示,同时图像结果也存储在硬盘上,如图1所示。

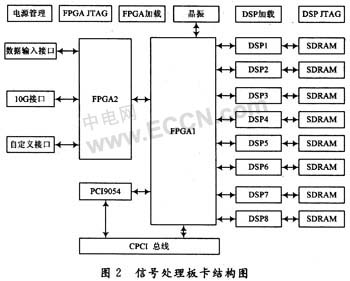
结合SAR成像处理大数据量、大通信量以及并发的大运算量等特点,要求信号处理板卡具备高速运算能力、大容量储存能力、高速I/O带宽、良好的拓扑结构和级联特性等要求。基于这些要求,我们选择了一个8片TS201组成的松耦合系统。系统结构示意图如图2所示。
2.1 系统整体性能
本系统具有强大的运算能力以及数据通信能力。板卡上有8片TS201,峰值运算性能为24 GFLOPS,每个TS201外挂256 MB的SDRAM,则总的存储容量达到2 GB。由于处理器要频繁地与外部存储器交换数据,8个DSP采用分离总线的形式进行连接,不存在总线共享引起的总线访问冲突问题,这样可以大大减轻总线的负担,可以发挥DSP的最大性能。
FPGA1与FPGA2之间采用LVDS(低压差分信号)接口进行数据传输,可以达到很高的传输速度。这种接口具有高的信号传输速度、低功耗、低误码率、低串扰和低辐射等特点。其最高数据传输速率是655 Mb/s,而理论上,在一个无损耗的传输线上,LVDS的最高传输速率可达1.923 Gb/s。
2.2 板间数据传输
8片DSP通过链路口构成一个环状连接,链路口连接方式如图3所示。链路口的时钟和数据线采用LVDS(低压差分信号),可以达到很高的速度,单个链路口的速度可以达到1 GB/s。每一个TS201有4个全双工的链路口,单向的传输速率为500 MB/s。8片DSP的数据总线都连接到了FPGA上,作为输入、输出数据通道,另外也可以在FPGA内部建立FIFO,作为两个DSP之间点对点数据交换通道。

2.3 板卡与主机接口
PCI9054与FPGA相结合的形式来实现,采用32 b,33 MHz的PCI总线标准,最大传输速度可以达到132 MB/s。实时图像的显示由主机通过CPCI总线将处理的结果读到主机内存,然后显示在主机的显示器上,多幅图像连续出现时将可以进行滑动的显示,同时图像结果也存储在硬盘上。
3.实时成像软件设计
在实际情况中,机载SAR,特别是中、低空飞行的机载SAR,由于气流不稳定的影响,运动的不稳定性较大,如果不采取运动补偿,则所录取的数据受到不稳定因素会有较大的失真,从而使成像质量下降,甚至不能成像。以前的大部分算法都是对全部数据反复地进行距离压缩、相位补偿并估计多普勒参数,得到较为准确的径向加速度估计值和调频率等参数以便进行包络和相位的补偿。把这种方法直接用到实时成像中显然存在两大缺点:一是需要等全部的数据都到了以后才能进行处理,不满足实时性的要求;二是运算量过大,耗费大量的存贮单元并且需要对存贮单元反复读写。
SAR实时处理要求能够实时地输出大面积连续图像,因而要求在不降低成像质量的前提下,尽量使算法简单,运算量小,稳健性高。基于以上分析,我们采用划分子孔径的方法进行运动补偿,每个孔径经运动补偿后实时成像,各孔径子图像经连接后形成连续的大面积图像。子孔径长度的选择实际中可以根据雷达载体的类型,飞行的平稳度等情况来选择。另外子孔径的长度也要达到分辨率的要求。
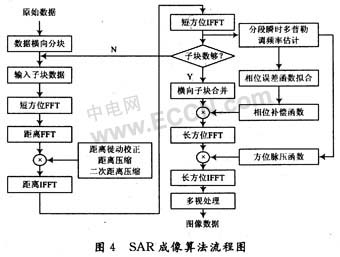
这里采用一种改进的距离一多普勒(R-D)成像算法,该方法先将原始数据沿方位向分块。然后对每一块进行短方位FFT,再作距离FFT,接着利用线性相位函数校正距离走动,并和脉冲压缩函数相乘,实现距离走动校正和距离压缩,接着做距离IFFT和短方位IFFT,将信号变换到时域,然后用图像偏移(MD)方法估计出各小块的多普勒调频率,再将横向的子块合并,采用相位补偿方法对机载速度不均匀引起的运动误差进行补偿,最后用估计的分段调频率拟合出整个孔径的调频率,得到相位误差函数,进行方位压缩,获得地面场景图像。该算法的流程如图4所示。
4. 实时任务的实现
4.1 存储量分析
实时成像数据处理采用2 048×8 192的数据块,并且在方位处理之前下一个孔径的数据已到来,数据共用为2 048×2 048的数据段。则每一个孔径的数据存储量为(2 048×8 192×2×4 B)/1 024/1 024=128。MB。在距离脉压以后要将距离向的点数丢掉1 024点后再进行方位脉压,则实际需要的存储量为64 MB。而试验所用的信号处理板卡每个DSP外接256 MB的SDRAM,共有8片TS201,该信号处理板卡满足设计要求的存储量。
4.2 任务分配
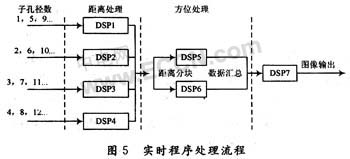
我们将每个合成孔径分为32个子孔径处理,每个子孔径方位采样点数为512。由于此成像算法首先要进行短方位FFT,因此需要积累满一个子孔径的数据后再开始距离脉压。可以让4个DSP来接收4个连续子孔径的数据,当子孔径数据积累满后就开始进行距离脉压,距离压缩后将数据丢掉一半后将结果存储在SDRAM中。当方位向数据积累达到要求时,就开始方位压缩。将数据按距离向分成两块,由两个DSP来同时完成方位压缩,从而在处理上达到并行的要求。在方位压缩完成得到图像后,就开始把图像传送给主机,由主机把图像显示出来。处理流程如图5所示。
4.3 计算量分析
距离压缩采用的点数为2 048点,由于我们用4片DSP进行距离处理,对某个DSP而言,当下一个子孔径数据到来之前,对上一个子孔径的距离方向的处理要全部做完,包括距离压缩,瞬时调频率估计以及发送数据。当PRF为1 000时,要求每个DSP在0.512 s*3=1.536 s内完成一个子孔径的距离处理。每一个回波脉冲的距离压缩包括一次2 048点的FFT,一次复向量的乘法和一次2 048点的IFFT和一个FFTSHIFT。读、取数据采用DMA操作,几乎不占用内核时间,故一个子孔径的距离压缩大概需要0.5 s,多普勒调频率估计需要的时间为0.33 s,共需时间为0.83 s,另为再加上少量的时间余量,实时性可以满足。
方位压缩时方位向的点数为8 192点,为了达到实时性的要求,我们在方位处理采用“乒乓操作”的思想。即开辟两个缓冲区,在第一个缓冲周期,将数据存放到缓冲1,在第二个缓冲周期,数据存放到缓冲2,与此同时,处理缓冲1中的数据,在第三个缓冲周期,数据又存放到缓冲1中,同时处理缓冲2中的数据,如此循环,周而复始,直到整个数据块处理完毕。在硬件上完成512个8 192点的方位压缩需要的时间为1.949 9 s,由于距离压缩后距离向点数丢了一半,我们用两个DSP来完成方位脉压。除去每个DSP自身积累数据的时间,容许DSP在4.5 s的时间里来完成处理。
5. 实测数据成像结果
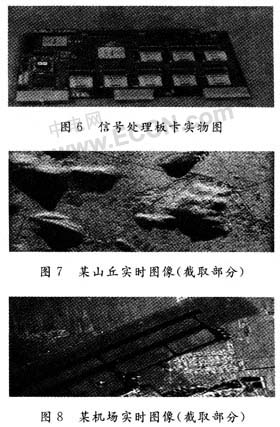
利用某机载雷达飞行数据进行测试试验。该雷达工作在X波段,天线方位孔径为D=0.55 m,雷达发射LFM信号,飞机飞行高度约为4 900 m,飞机飞行速度约为115 m/s。对录取的回波进行实时处理试验得到某地区的SAR图像。图6为信号处理板卡实物图。图7和图8为某山丘和机场地区的SAR图像,均是利用本文中系统处理得到的实时成像图。图中的山丘、机场清晰可见,成像质量得到保证。
6. 结 语
本文利用某机载雷达的实测数据,采用频域校正距离走动和弯曲的距离一多普勒算法。在TS201信号处理板卡上完成实时成像处理,从存储量和运算时间上都满足设计要求。这里只利用了一块信号处理板卡来实现实时处理,如果对于更大的场景成像处理时,我们可以考虑用多块处理板卡来共同完成实时任务。
|